The CANDELOR SDK is a solution for 3D scene interpretation. As of now, it features a highly robust 3D object localization algorithm. This algorithm is designed to be very robust, highly scalable, and applicable to a very wide range of objects. In practice that means CANDELOR is applicable to a very wide range of object localization tasks.
Watch the video below to see CANDELOR in action in the User Interface that comes with the installer.
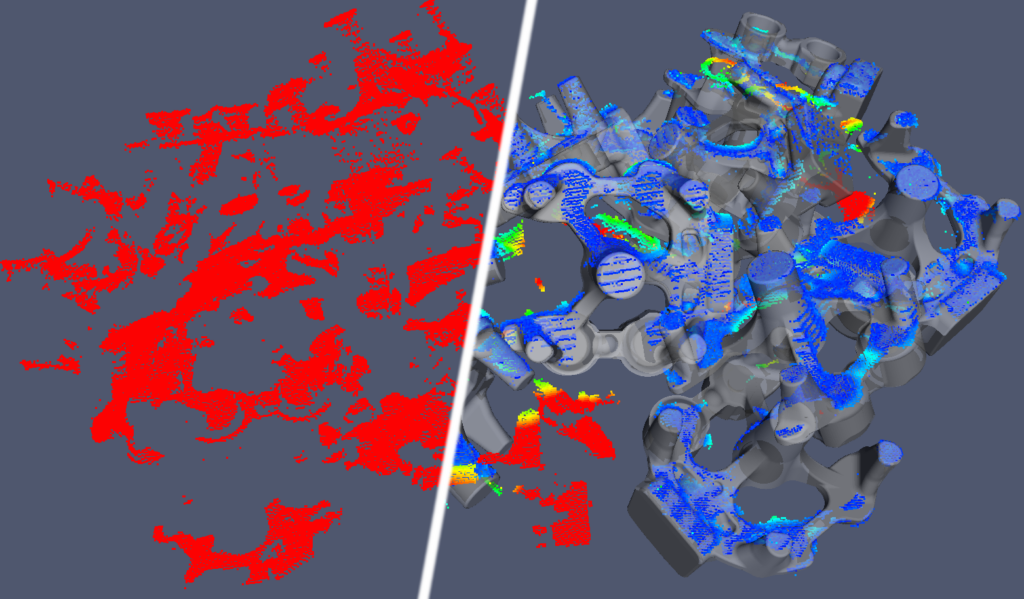
Robust Object Localization
Here you can see an example run of CANDELOR’s object localization. The images displays the matching result:
Features
The CANDELOR SDK is:
- Easy to Use
A generic and consistent API allows to quickly make use of the functionality and develop your first object localization application within minutes. The SDK offers a pure C-based API without additional compile time dependencies. - Flexible
Due to its nature, CANDELOR supports a wide range of objects for recognition. This includes highly complex parts like crank shafts to simple parts like cylindrical objects. - Robust
The object localization is robust against noise, occlusions, and incorrect CAD models. See e.g. complex object localization. - Scalable
CANDELOR has been used in multiple different use cases. On the high speed end, it is used for realtime recognition of 3D objects. Sensor like the Microsoft Kinect can achieve a frame rate of 30 fps. CANDELOR can be configured with a maximum allotted recognition time for these purposes, for a custom a tradeoff between recognition quality and speed. On the other end, CANDELOR can be configured to spend more time for recognition to get more robust results and to detect all objects in the scene.
Workflow
The following picture shows the general principle behind the localization of CANDELOR:
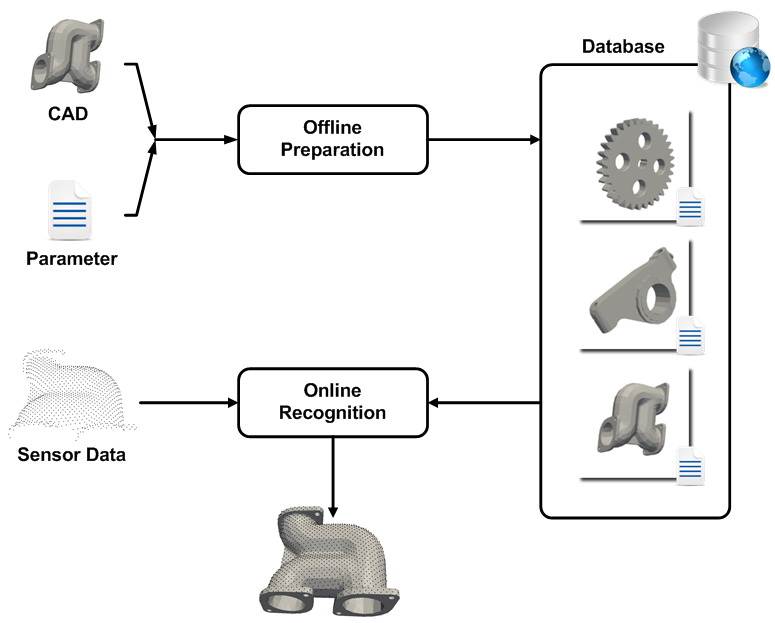
Offline Preparation
In a first step, a CAD model together with a few parameters like average scan resolutions are used to generate a configuration for later recognition. This offline preparation step is performed once per CAD model. The outcome is a configuration for the object recognition, that can be stored as a file. This configuration is a basis for all later recognition, and it is possible to fine tune this through experimentation with concrete scans by hand.
Online Recognition
Armed with the previously generated configuration, CANDELOR loads and is ready for action. When supplied with a fresh scan in form of 3D point cloud, CANDELOR detects the configured model and returns the position of the detected objects, ordered by recognition quality. Each position comes in the format of a transformation matrix that contains translation and orientation to transform the CAD model into the point cloud.